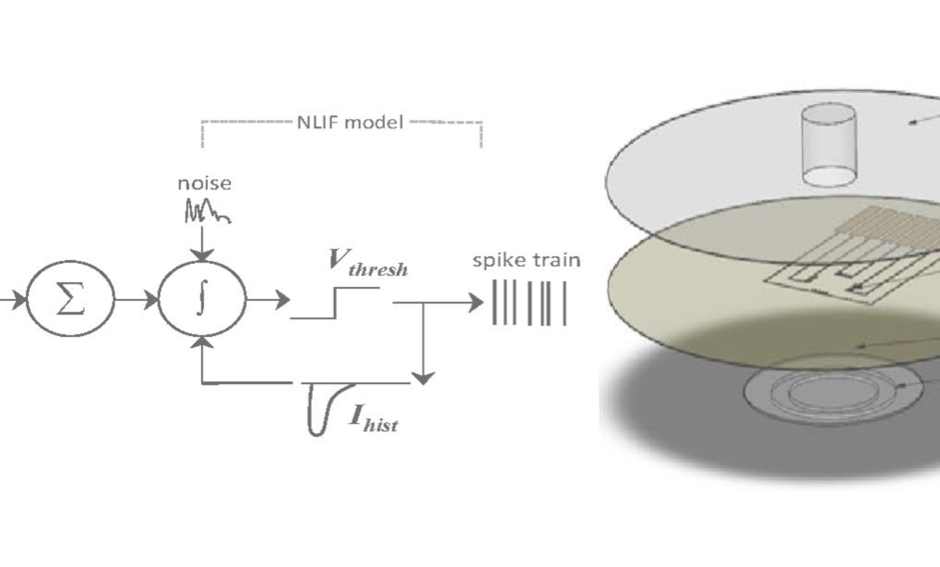
Current prosthetic limbs are limited by a lack of tactile feedback. Slip feedback is particularly important to inform grip. Object slip is marked by both a change in the normal grip force applied and a change in force tangential to the fingertips. In this study, we demonstrate that a new multi-axial tactile sensor composed of gold nanoparticle strain gauges is able to record slip and reconstruct the X, Y, and Z forces incident on the sensor's surface due to a slipping object. We entered the X, Y, and Z force components generated by the slip event into a noisy leaky integrate and fire model to simulate the firing responses of SA1 and FA1 afferents. We also recorded a uniaxial normal force input representative of tactile contact. A single set of SA1 model and FA1 model parameters generated realistic firing patterns for both the slip and normal force recordings. These results suggest that canonical SA1 and FA1 afferent models could be used to generate biomimetic electrical stimulation patterns for both slip and touch stimuli. When used to activate the tactile afferents of an amputee, these electrical stimulation patterns could create natural and distinguishable slip and touch percepts for closed loop control of an upper limb neural prosthesis.